

כלי הרכב האוטונומיים של מובילאיי, המצוידים כעת במערכת החישה True Redundancy מציגים בסרטון חדש ולא ערוך מיומנויות נהיגה דומות לאלה של נהג אמיתי.

מובילאיי, מקבוצת אינטל, הציגה היום בישראל את מערכת החישה True Redundancy הפועלת ללא מגע יד אדם. מדובר באבן דרך משמעותית לקראת השקת שירותי הרובו-טקסי המתוכננים לפעול בישראל ובגרמניה. הרכב האוטונומי שמוצג בסרטון מדמה מיומנויות של נהג אנושי ומחקה נהיגה מרובת עצירות בדומה לשירותי הזמנת הנסיעה (ride hailing). "בניגוד לנורמות המקובלות בתעשייה, מערכת True Redundancy של מובילאיי פועלת עם שתי מערכות חישה נפרדות המגבות אחת את השנייה. התמרון הטבעי של הרכב בתרחישים מורכבים להפליא מוכיח את הערך של גישה זו". אומר יוהן יונגווירת', סגן נשיא של ניידות כשירות (mobility-as-a-service), מובילאיי.
בסרטון נראה הרכב האוטונומי של מובילאיי כשהוא מתפקד כשירות רובו-טקסי, נוסע ליעדים מרובים ועוצר בנקודות איסוף והורדת נוסעים. בפרק החמישי של סדרת סרטוני הנהיגה הלא ערוכים, מוצגת מלוא יכולתה של מערכת ה- True Redundancy. הגישה הייחודית של מובילאיי למיזוג סוגי החיישנים ברכב האוטונומי (AV) מובילה את הרובו-טקסי של החברה בניווט ברחובותיה המורכבים של ירושלים בשעות הלילה. בעוד שסרטונים לא ערוכים קודמים הציגו את הרכב האוטונומי במהלך נסיעה עם מערכת המצלמות בלבד, בסרטון החדש מופיע הרכב האוטונומי בתצורתו המלאה שבה מתכננת מובילאיי להשתמש בפריסות המסחריות של הרובו-טקסי.
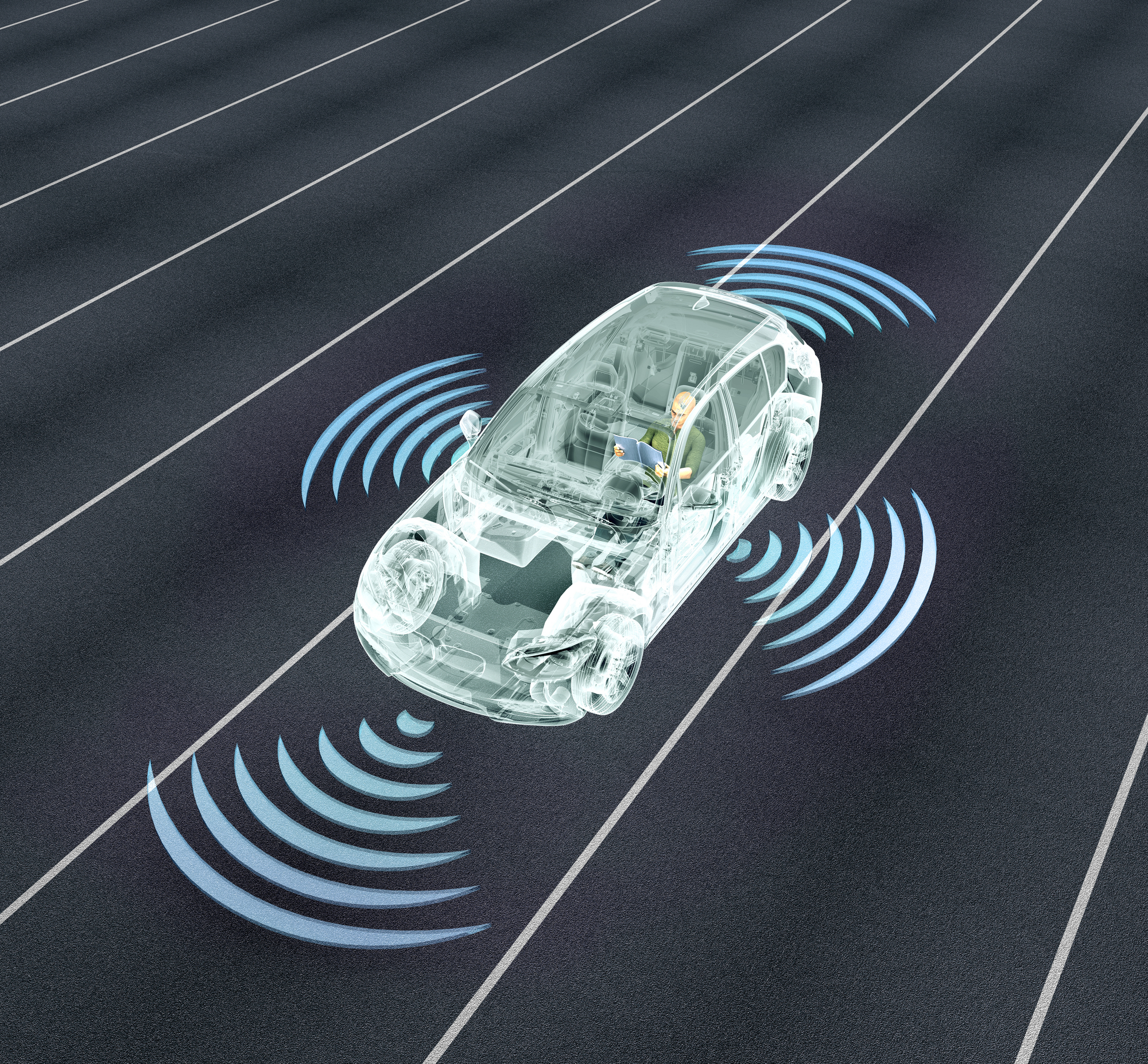
כיצד זה פועל: True Redundancy היא הגישה הייחודית של מובילאיי למיזוג חיישנים המשתמשת בשתי תת-מערכות חישה עצמאיות – האחת עם מצלמות בלבד והשנייה משלבת רדאר ולידאר – כדי לשמש כגיבוי אחת לשנייה במקום כמערכות משלימות. התוצאה היא פתרון חישה שאמור להאריך את הזמן הממוצע בין תקלות. כלי הרכב האוטונומיים שנוסעים כעת בישראל הם הכלים הראשונים של מובילאיי שמשלבים את שתי המערכות בכלי רכב אחד, וממחישים את הביצועים הצפויים של הרובו-טקסי בפעולה בעולם האמיתי.
בסרטון לא ערוך בן 40 דקות, נראה הרכב האוטונומי של מובילאיי כשהוא מבצע תמרוני נהיגה מורכבים בכבישי העיר למרות תנאי תאורת לילה קשים ותמרורי דרך מורכבים. הנהיגה האנושית של הרכב האוטונומי נראית נורמלית להפליא, והוא מצליח להתמודד עם תמרונים מאתגרים ללא כל היסוס.
הרכב האוטונומי משתלב עם נהגים אנושיים בעת ביצוע פנייה שמאלה בצומת לא מרומזר (4:04; 06:48), דבר שנראה פשוט אך בפועל כלל לא,מנווט בצורה בטוחה ומוצלחת סביב הולכי רגל החוצים את הכביש שלא במעבר חציה (08:28,10:42), מתמודד בצורה חלקה עם תמרונים בלתי חוקיים של נהגים אחרים (04:34); משלים פנייה של 180 מעלות בצומת עם תמרורים מרובים (25:18); מנווט סביב כלי רכב החוסמים את הנתיב (25:39); מנווט במעגל תנועה עם הולכי רגל (26:44); ומבצע תמרוני נהיגה רגילים אחרים.
מיזוג חיישנים
ההדגמה של True Redundancy בכבישים אמתיים מסייעת בהסרת הספק שהטילה התעשייה בגישה שאימצה מובילאיי למיזוג חיישנים. הרכב האוטונומי מבצע את הנסיעה כפי שנהג אנושי היה עושה זאת, ומפגין מוכנות כמעט מוחלטת לקראת הפעלת שירותי הרובו-טקסי המתוכננים. בהתבסס על היכולות האדירות של צי פיתוח הרכב האוטונומי המבוסס מצלמה של מובילאיי, התוספת של רדאר-לידאר לחבילת החיישנים שלו היוותה את השלב האחרון בהשגת היעדים שהחברה הציבה לעצמה עם טכנולוגיית הרכב האוטונומי הייחודית.
הפיכת מערכת True Redundancy לפעילה הינה אבן דרך מרכזית בשירות הרובו-טקסי של מובילאיי המתוכנן לפריסה בהמשך השנה בגרמניה ובישראל. מובילאיי החלה את תהליך קבלת ההיתרים והאישורים הרגולטוריים בשתי המדינות, שיאפשרו לחברה להתחיל לוותר על נהגי הבטיחות בכבישים ציבוריים.
Mobileye Drive, מערכת הנהיגה העצמית של מובילאיי, משלבת את הטכנולוגיות המובילות בתעשייה של מובילאיי, כולל Road Experience Management, הגישה הקניינית של החברה למיפוי, שממנפת נתונים ממיקור המונים ממערכות סיוע לנהג מתקדמות בשוק ההמוני כדי לבנות מפות עבור רכב אוטונומי בהודעה קצרה; מדיניות נהיגה Responsibility-Sensitive Safety (RSS) המיישמת מודל מתמטי לשיפור הבטיחות באמצעות התאמה משופרת לסביבות נהיגה ייחודיות; ו-True Redundancy, המשלבת שתי תת-מערכות חישה עצמאיות המופעלות על ידי מצלמות ורדאר-לידאר, שכל אחת מהן מסוגלת לפתח מודלים מלאים ובסופו של דבר לתמוך ביכולות אוטונומיות מלאות מקצה לקצה.