







מערכת-של-מערכות היא אוסף של מערכות, שלכל אחת מהן תפקיד יעודי וכולן צריכות לעבוד יחד. בנוסף לסביבה הדיגיטלית המסורתית הקיימת במערכות-על-שבב (SoCs) תכנונים של מערכות משלבים אלמנטים פיזיים כמו כניסות חיישנים ואינטראקציות מכניות. דוגמה מושלמת היא הרכב האוטונומי (AV) כפי שמראה באיור 1.
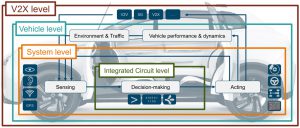
רמות התכנון של הרכב האוטונומי:
• רמת המעגל המשולב (IC) שיכולה לכלול אחד או יותר תכנונים של מערכת-על-שבב SoC))
• רמת המערכת מורכבת ממספר יחידות בקרה אלקטרוניות המחוברות זו לזו (ECU) המקפלות כמה או מספר מכשירי IC ומפקחות על פעולות הרכב תחת תרחישי נהיגה שונים.
• מפלס הרכב המקיף את כל המכונית.
• הרמה העליונה היא רמת הקישוריות המקיפה את שלושת הרמות.
האם ניתן לבדוק תכנון של רכב אוטונומי באמצעות תרחישים בזמן אמת? ההערכות אומרות שזה ייקח מיליארדי מיילים של ניסויים בדרכים. במקום זאת, מה שנדרש הוא פלטפורמת אימות בעלת ביצועים גבוהים הפועלת על דגמים דיגיטליים מדויקים בסביבה וירטואלית המחקה תרחישים בזמן אמת.
PAVE360
PAVE360 (איור 2) בנוי על הרעיון של תאום דיגיטלי, והוא מורכב מסביבת אימות ותקפות רכב אוטונומי מלאה שתוכננה על פי רמת המערכת המייצגת תמונת מראה של הרכב הפיזי וסביבת הנהיגה. התאום הדיגיטלי של המערכת עשוי דגמים דיגיטליים המייצגים את סביבת הרכב האוטונומי כולל חיישנים, מעבדים, מפעילים, ECUs, רשתות קישוריות ותרחישי נהיגה. התאום הדיגיטלי הזה יכול לאמת את המערכת של המערכות מבלי לנסוע מיליארדי מיילים.

באיור 2 ניתן לראות כי Simcenter PreScan מייצר את תרחישי הנהיגה ונתוני החיישנים המניעים את מערכת המחשוב בפלטפורמת האמולציה של Veloce . Simcenter AMESim מספק הדמיית מערכות ליצירת סביבת לולאה סגורה. אימות טרום סיליקון של תכנון רכב אוטונומי מתאפשר כיום באמצעות PAVE360. לפרטים נוספים וכדי להבין את כל יכולות המערכת אתם מוזמנים לצפות בסמינר זה.
מאמר זה מתפרסם בחסות חברת מנטור Mentor, a Siemens Business